ИСЗ «Метеор» обладает системой ориентации, которая дает постоянное направление вертикальной оси этого КА на центр Земли (что обеспечивается датчиками инфракрасной вертикали). Успокоение ИСЗ после выведения на орбиту производится с помощью исполнительных органов — реактивных сопел, работающих в импульсном режиме на сжатом азоте. В процессе полета исполнительными органами уже являются электродвигатели-маховики, оси которых совпадают с осями ИСЗ.
В отличие от других ИСЗ в «Метеоре» панели солнечных батарей закреплены на осях и могут вращаться относительно вертикальной оси КА. Кроме того, они имеют возможность поворачиваться вокруг второй оси, перпендикулярной первой. Поворот панелей солнечных батареи осуществляется собственной системой ориентации, состоящей из оптических датчиков и электродвигателей.
Система ориентации, система терморегулирования и другие служебные системы должны функционировать слаженно, целеустремленно. Поэтому и руководит работой КА одна из важных его систем, мозг космического робота, — система управления.
Система управления. Автоматические КА, предназначенные для проведения сложной научной программы (например, для исследования планет и других небесных тел), а также имеющие многоплановые задачи, снабжаются системой управления. Она уже по своему названию предопределяет управление почти всеми системами КА и, в частности, решает такие задачи, как обеспечение угловой стабилизации и стабилизации центра масс КА при выведении его на орбиту ИСЗ, при полете по этой орбите, а также при выводе КА на траекторию полета к планете.
Так, например, система управления обеспечивает стабилизацию КА при работе корректирующе-тормозной двигательной установки в сеансах коррекции и торможения, суммирует приращение скорости для формирования главной команды на отключение корректирующе-тормозной двигательной установки. Кроме того, система управления на основе памяти ЭВМ (программы) создает разворот автоматического КА, используя исполнительные органы системы ориентации. Контроль за правильностью разворота осуществляется с помощью трехосной гиростабилизированной платформы. Все эти операции проводятся в сеансах как коррекции, так и торможения и фотографирования. Строго по меткам времени система управления выдает команды на включение различных систем КА с целью успешного выполнения маневра на орбите, производит введение различных программ в память ЭВМ, их контроль и хранение.
Система управления состоит из различных приборов и входящих в нее сложных подсистем. К ним относятся бортовые цифровые вычислительные машины, автомат стабилизации и различные подсистемы (приведения, обогрева, космической астронавигации, регулирования кажущейся скорости и т. д.). Для проведения коррекции орбиты КА предварительно, за 1 или 2 сут, проводится сеанс связи, при котором в память ЭВМ вводится программа. В ней задаются величины углов для разворота по трем перпендикулярным осям, величина скорости, получаемой КА от работы двигательной установки. Главное — вся программа жестко увязана по времени: задано время совершения разворота по той или иной оси, время окончания разворотов, точное время включения двигательной установки и целый ряд других данных, необходимых для проведения правильных и согласованных действий различных систем КА.
Во время проведения сеанса коррекции перед пуском корректирующе-тормозной двигательной установки система ориентации ориентирует КА в пространстве (по заложенной в ЭВМ программе) по угловым значениям разворотов по всем трем осям. Затем, при раскрутке роторов гироскопов, обеспечивается сохранность заданного положения автоматического КА в пространстве относительно его центра масс. При этом система ориентации отключается и стабилизация осуществляется от гиростабилизированной платформы.
Разворот КА требуется для придания двигательной установке требуемого направления для проведения коррекции. ЭВМ из своей памяти выдает в точно рассчитанное время команду на включение двигательной установки, интегратор системы управления суммирует приращение скорости и при достижении заданной всличины выдаст команду на выключение двигательной установки. Спустя некоторое время КА по программе ЭВМ вновь с помощью системы управления возвращается в первоначальное положение. Радиаторы системы терморегулирования и солнечная батарея вновь занимают правильное положение относительно Солнца.
Система управления КА на различных участках траектории полета выполняет задачи по управлению движением его центра масс, т. е. движением собственно автоматического КА — изменением скорости движения по траектории полета и изменением направления движения (коррекции траектории полета, переход с пролетной траектории на орбиту спутника планеты и т. д.). Управление же движением КА относительно центра масс (развороты и вращение КА) — это задача ориентации, и с этим как раз и справляется система ориентации.
Только в сеансах коррекции, торможения и некоторых других специфических условиях полета система управления, как правило, решает эти задачи. Система ориентации в этих случаях отключается, но ее исполнительные органы продолжают работать.
Система управления решает также задачу по запланированному входу КА в атмосферу планеты с допустимыми перегрузками. Так, спускаемый аппарат ИСЗ (например, биологического) после полета по околоземной орбите с первой космической скоростью, равной примерно 8 км/с, под малым углом входит в атмосферу. При спуске по баллистической траектории КА испытывает перегрузку в 8-10 g. Если же вход в атмосферу происходит под большим углом, то перегрузки становятся еще больше из-за резкого торможения. Так, например, при входе со второй космической скоростью спускаемого аппарата станции «Вснсра-4» в атмосферу Венеры под большим углом перегрузки достигали около 400 g. В то же время возвращаемый аппарат автоматической станции «Зонд» после облета Луны входил по баллистической траектории в атмосферу Земли со скоростью входа около 11 км/с. Посадка в заданном районе и приемлемый режим аэродинамического торможения-с перегрузками 10–16 g стали возможны благодаря совершенству и точности работы системы управления. Последняя с большой точностью обеспечила условия входа в атмосферу Земли пол углом 5–6° к плоскости местного горизонта.
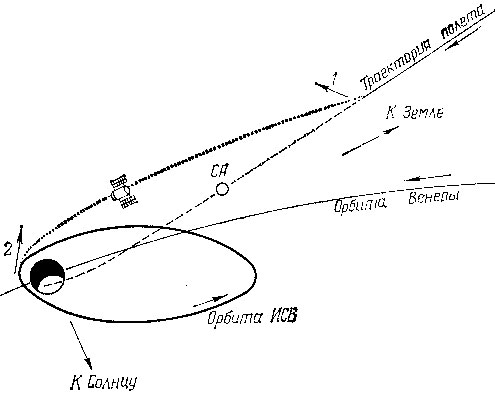
Для межпланетных станций система управления выполняет сложные действия по разделению частей автоматического КА и управляет их дальнейшим движением. Так, например, станция «Венера-10» за 2 сут до подлета к планете должна была отделить спускаемый аппарат (рис. 2). Полет при этом происходил по «попадающей» траектории, т. е. станция сближалась с Венерой и вошла в ее атмосферу (что для спускаемого аппарата было даже и необходимо). Но затем орбитальный отсек станции, отделив спускаемый аппарат по команде, поступившей от системы управления, развернулся. В расчетное время система управления включила двигательную установку на заданный интервал времени, позволивший осуществить переход на новую пролетную траекторию.
Рис. 2. Схема подлета станции «Венера-10» к планете (1 — импульс для увода станции после разделения ее со спускаемым аппаратом; 2 — импульс торможения для вывода КА на орбиту спутника планеты)
Работа двигательной установки осуществлялась с некоторой погрешностью, да и расстояние до планеты было измерено с определенной степенью точности, и поэтому выход станции к планете лежал в определенных пределах расстояний до се поверхности. Управлять с Земли разворотом подобной станции и определять величину тормозного импульса было затруднительно, так как расстояние от станции до Земли составляло порядка 70 млн. км, а радиосигнал этот путь проходит в течение почти 4 мин. Поэтому-то решение задачи управления было возложено на космический робот.
Следует сказать, что и системе управления «Венеры-10» имелась система космической астронавигации, которая с помощью оптического датчика определяла направление на центр планеты и запоминала направление движения станции. Бортовая цифровая вычислительная машина непрерывно определяла координаты станции, расстояние до планеты и необходимую величину тормозного импульса для создания искусственного спутника Венеры. Определялось расчетное время включения двигательной установки в момент пролета через перицентр, рассчитывались углы разворота станции, приводящего к положению двигательной установки соплом против движения КА.