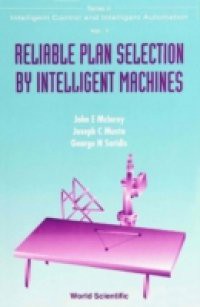
This book derives techniques which allow reliable plans to be automatically selected by Intelligent Machines. It concentrates on the uncertainty analysis of candidate plans so that a highly reliable candidate may be identified and used. For robotic components, such as a particular vision algorithm for pose estimation or a joint controller, methods are explained for directly calculating the reliability. However, these methods become excessively complex when several components are used together to complete a plan. Consequently, entropy minimization techniques are used to estimate which complex tasks will perform reliably. The book first develops tools for directly calculating the reliability of sub-systems, and methods of using entropy minimization to greatly facilitate the analysis are explained. Since these sub-systems are used together to accomplish complex tasks, the book then explains how complex tasks can be efficiently evaluated.Contents:Selecting Reliable Plans: An IntroductionCalculating Reliability in Multi-Dimensional SystemsA Review of Entropy MethodsApplication to Pose AlgorithmsReliability Optimization of Single-Input Control SystemsReliability Estimation TechniquesReliability Estimation for Complex Tasks and SystemsCase Study: Robotic Assembly SystemReflections on the State of the ArtReadership: Robotics engineers.Key Features:Gives a comprehensive description of global food and agribusiness environment, food production trends and the structure of food chainsCovers international investments and the role of governments in food chainsEasy-to-read book with practical discussion questions and exercises